今日从 arXiv 订阅中筛选 8 篇论文。
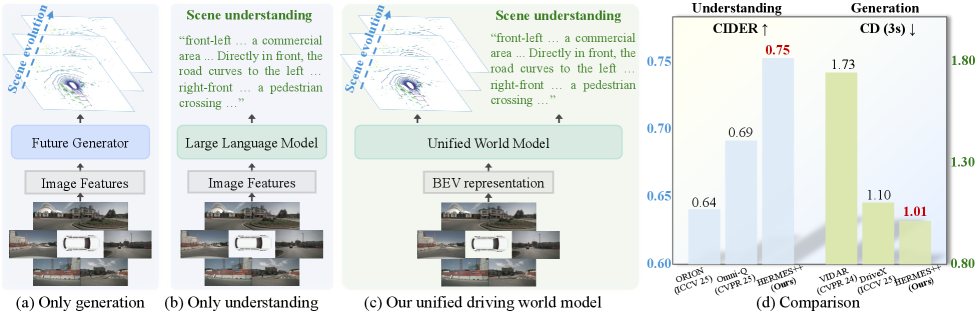
⚡ HERMES++ Toward a Unified Driving World Model for 3D Scene Understanding and Generation
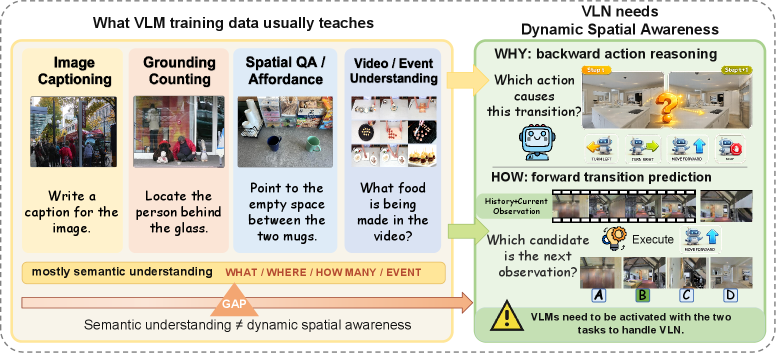
⚡ SpaAct Spatially-Activated Transition Learning with Curriculum Adaptation for Vision-Language Navigation
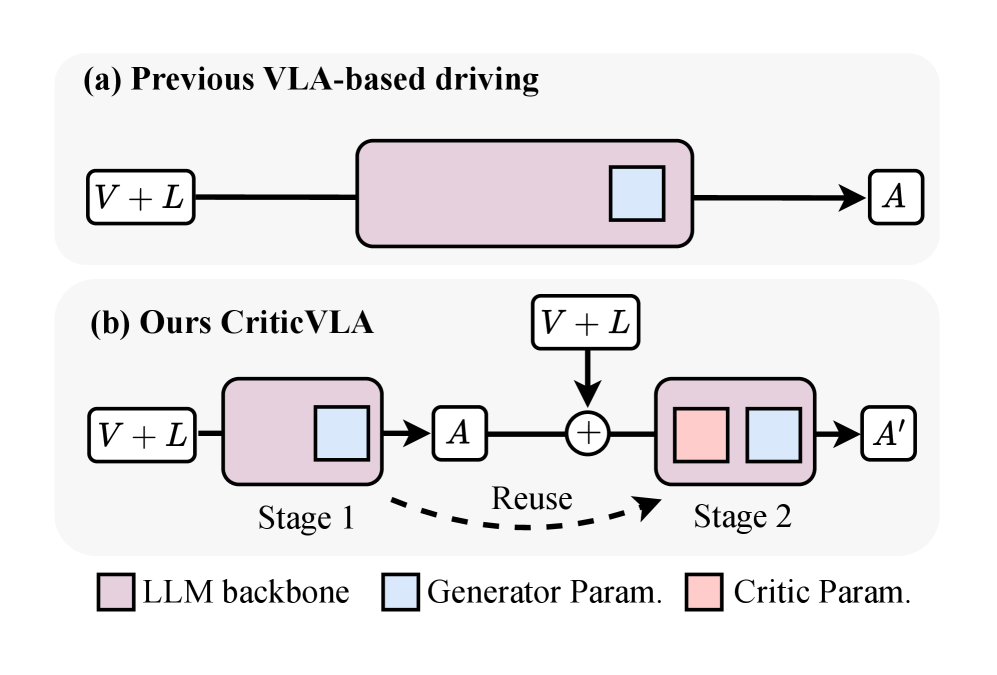
⚡ Judge, Then Drive A Critic-Centric Vision Language Action Framework for Autonomous Driving
⚡ Understanding Adversarial Transferability in Vision-Language Models for Autonomous Driving A Cross-Architecture Analysis
⚡ A Pattern Language for Resilient Visual Agents
⚡ PRTS A Primitive Reasoning and Tasking System via Contrastive Representations
⚡ Detecting is Easy, Adapting is Hard Local Expert Growth for Visual Model-Based Reinforcement Learning under Distribution Shift
自动生成于 2026-05-02 · 基于 arXiv Daily Digest